colab에서 진행함
필요한 라이브러리들
import torch
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transforms
import torch.nn.functional as F
import numpy as np
from torch.utils.data import DataLoader
import matplotlib.pyplot as plt
mnist
# Define a transform to normalize the data
transform = transforms.Compose( [transforms.ToTensor(), transforms.Normalize((0.5), (0.5))
])
# Download and load the training data
trainset = datasets.MNIST('MNIST_data', download = True, train = True, transform = transform)
testset = datasets.MNIST('MNIST_data/', download = True, train = False, transform = transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size = 64, shuffle = True)
testloader = torch.utils.data.DataLoader(testset, batch_size = 64, shuffle = True)
간단한 cnn 신경만 만들고
class BasicBlock(nn.Module):
def __init__(self,in_channels, out_channels,ksize=3, stride=1, pad=1):
super (BasicBlock, self).__init__()
self.body = nn.Sequential (
nn.Conv2d(in_channels, out_channels, ksize, stride, pad),
nn.ReLU( inplace=True)
)
def forward(self, x):
out = self. body(x)
return out
# Define the network architecture
class CNN(nn.Module):
def __init__(self):
super (CNN, self). __init__()
self.b1 = BasicBlock(3, 32)
self.b2 = BasicBlock(32, 32)
self .maxpool = nn.MaxPool2d(2, 2)
self.dropout = nn.Dropout (0.25)
self.b3 = BasicBlock(32, 64)
self.b4 = BasicBlock(64, 64)
self.linear1 = nn.Linear(3136, 512)
self.linear2 = nn.Linear(512, 10)
def forward(self,x):
x = x.expand(x.shape[0],3,28,28)
out = self.b1(x)
out = self.b2(out)
out = self.maxpool (out )
out = self. dropout (out )
out = self.b3(out)
out = self.b4(out)
out = self.maxpool(out)
out = self.dropout(out)
out = out.view(out.size(0),-1)
out = self.linear1 (out)
out = self.dropout (out )
out = self.linear2(out)
return out
batch_size = 256
model = CNN().cuda()
optimizer = optim.SGD(model.parameters(), lr=1e-1)
criterion = nn.CrossEntropyLoss()
epochs = 10
학습
t_accs, v_accs, t_loss, v_loss = [],[],[],[]
temp = []
for epoch in range(epochs) :
train_loss = 0
train_accuracy = 0
model.train()
for i, (images, labels) in enumerate(trainloader):
images = images.cuda()
labels = labels.cuda()
optimizer.zero_grad()
output = model(images)
ps = torch.exp(output)
top_p, top_class = ps.topk(1, dim = 1)
equals = top_class == labels.view(*top_class.shape)
labels.view(*top_class.shape)
train_accuracy += torch.mean(equals.type(torch. FloatTensor))
loss = criterion(output, labels)
loss.backward()
optimizer.step()
train_loss += loss.item()
t_accs.append(train_accuracy/len(trainloader))
t_loss.append(train_loss/len(trainloader))
# Validation pass
test_loss = 0
test_accuracy = 0
# Set the model to evaluation mode
model.eval ()
for images, labels in testloader:
images = images.cuda()
labels = labels.cuda()
log_ps = model(images)
test_loss += criterion(log_ps, labels).item()
ps = torch. exp(log_ps)
top_p, top_class = ps.topk(1, dim = 1)
equals = top_class == labels. view(*top_class.shape)
test_accuracy += torch. mean(equals. type(torch.FloatTensor ))
v_accs.append( test_accuracy/ len(testloader ))
v_loss.append( test_loss/len(testloader))
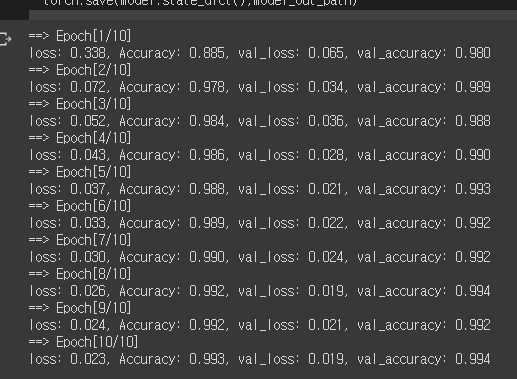
print("==> Epoch[{}/{}]". format (epoch+1 , epochs) )
print("loss: {:.3f}, Accuracy: {:.3f}, val_loss: {:.3f}, val_accuracy: {:.3f}"
.format(t_loss[-1], t_accs[-1], v_loss[-1],v_accs[-1]))
model_out_path = './model.pth'
torch.save(model.state_dict(),model_out_path)
결과
model = CNN().cuda()
model_out_path = './model.pth'
checkpoint = torch. load(model_out_path)
model.load_state_dict(checkpoint, strict = True)
kernels = []
weights = []
bias = []
for name, param in model.named_parameters():
if 'body' in name:
if 'weight' in name:
kernels.append(name)
minv,maxv = param.min(), param. max()
param = (param-minv)/(maxv-minv)
weights.append(param.cpu().detach().numpy())
n_kernels = 32
# Visualize conv filter
plt.figure(figsize=(20,3))
plt.title("Kernels of conv2d")
for i in range(n_kernels):
f= weights[0][i,:,:,:]
for j in range(3):
plt.subplot (3, n_kernels, j*n_kernels+i+1)
plt.imshow( f[j,:,:],cmap='gray')
plt.xticks([]); plt.yticks([])
plt.title(str(i)+'_'+str(j))

class partial_CNN(nn.Module):
def __init__(self):
super (partial_CNN, self). __init__()
self.b1 = BasicBlock(1, 32)
def forward(self,x):
out = self.b1(x)
return out
partial_Model = partial_CNN()
checkpoint = torch. load(model_out_path)
partial_Model.load_state_dict(checkpoint, strict=False)
for test_images, _ in testloader:
x_test = test_images[3]
break
plt.imshow(x_test[0,:,:], cmap='gray')
x_test = x_test . unsqueeze(0)
x_test = partial_Model(x_test).detach().numpy().squeeze()
plt.figure(figsize=(20,3))
for i in range(32):
plt.subplot(2,16, i+1)
plt.imshow(x_test [i,:,:], cmap='gray')
plt.xticks([]); plt.yticks([])
plt.title('map'+str(i))
plt.show()
